
The project that officially began in July 2021, is not anywhere near completion today. Initially it was going to be a simple weekend project, that accidentally turned into the biggest challenge I’ve ever taken. Because I graduated the high school I’m going to have a lot of time to work on the project from now on and hopefully during the university too (which starts in October this year).
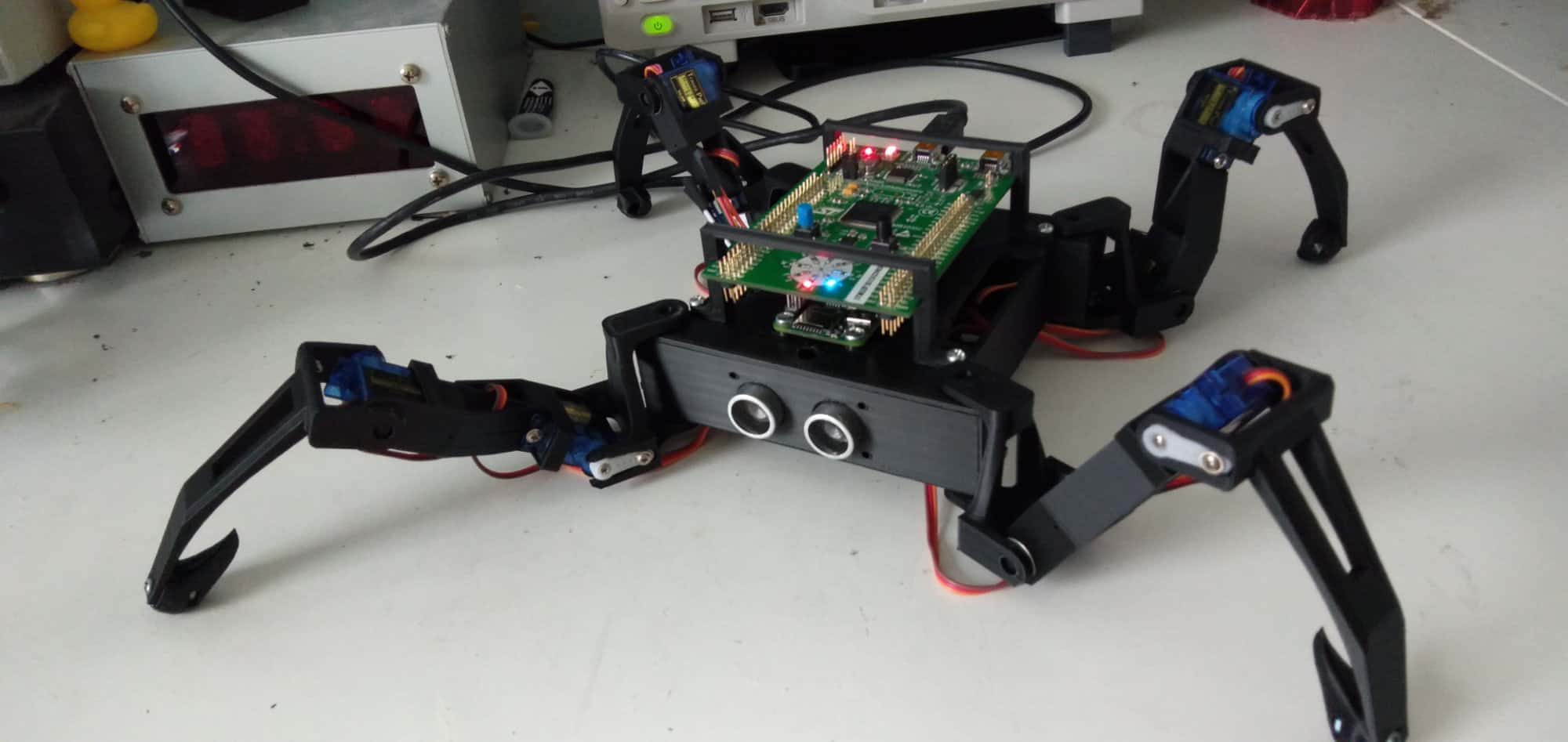
So once again. The first prototype was based on SG90/MG90 servos, utilized an STM32 Discovery devboard and most mechanical parts were 3D printed. The robot was going to look like a poison headcrab from a very popular game from Valve.
Main problems with this prototype: SG90 servos were fragile, and once changed to metal MG90 ones, they hadn’t given me enough control (the problem of servo hunting literally haunted me) For some reason I wasn’t able to properly implement forward kinematics too, but probably it was just my poor coding skill. This was the point when the project became serious..
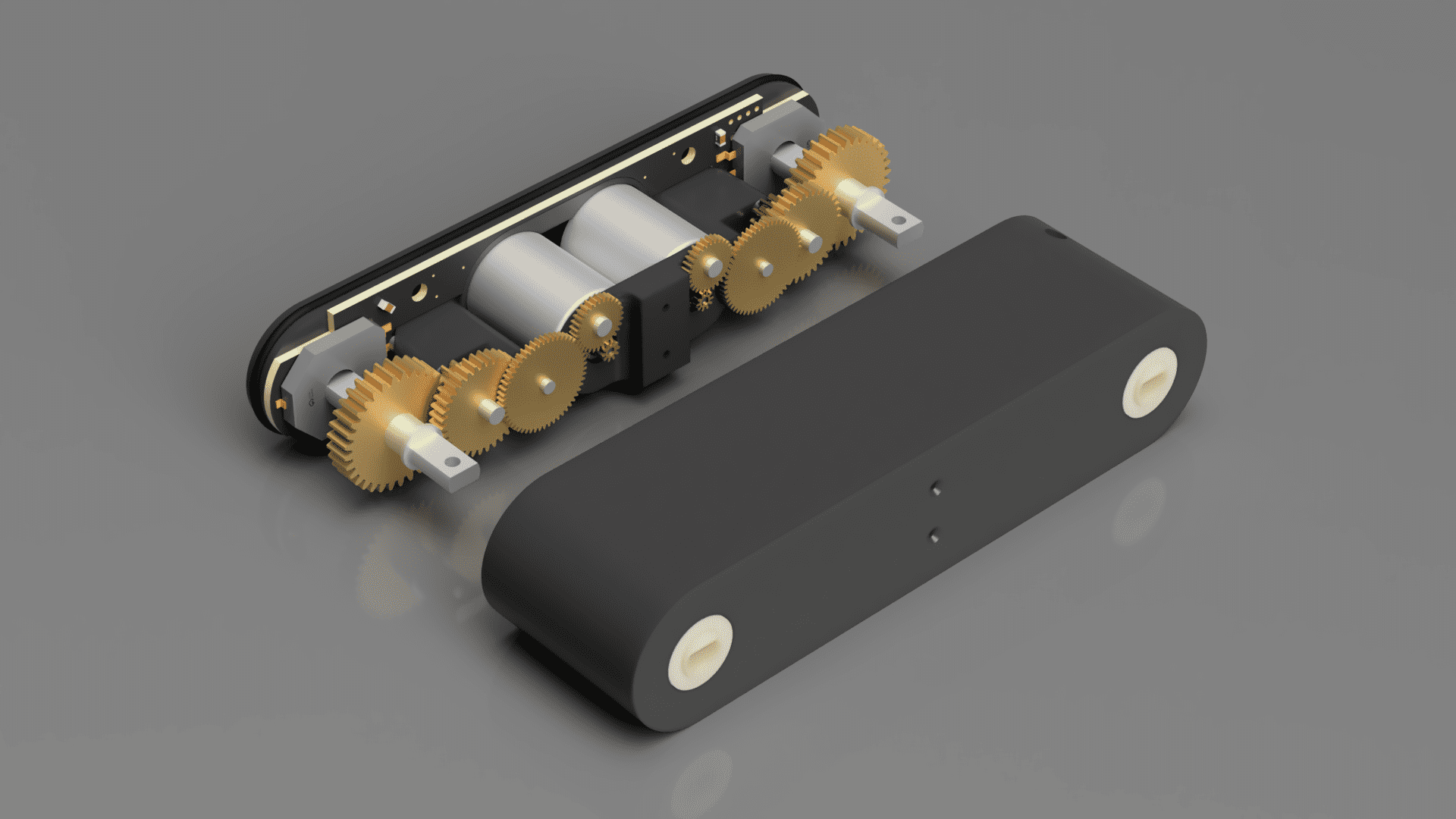
The main problem were mechanics, so I designed my own servo. I contacted some manufacturers (which I think of now as sponsors) for some help, and they are:
- Autodesk (basic student licence but I still count it)
- Trinamic (as Maxim as Analog devices)
- Igus
- PCBWay (thanks Liam!)
When I was designing the new servo, some measurements were required (taking characteristics of the chosen DC motor), creating a first PCB for testing, more 3D printing.. even got some 3D printed gears from PCBWay, which helped develop the project a lot. So after 3 years, we got:
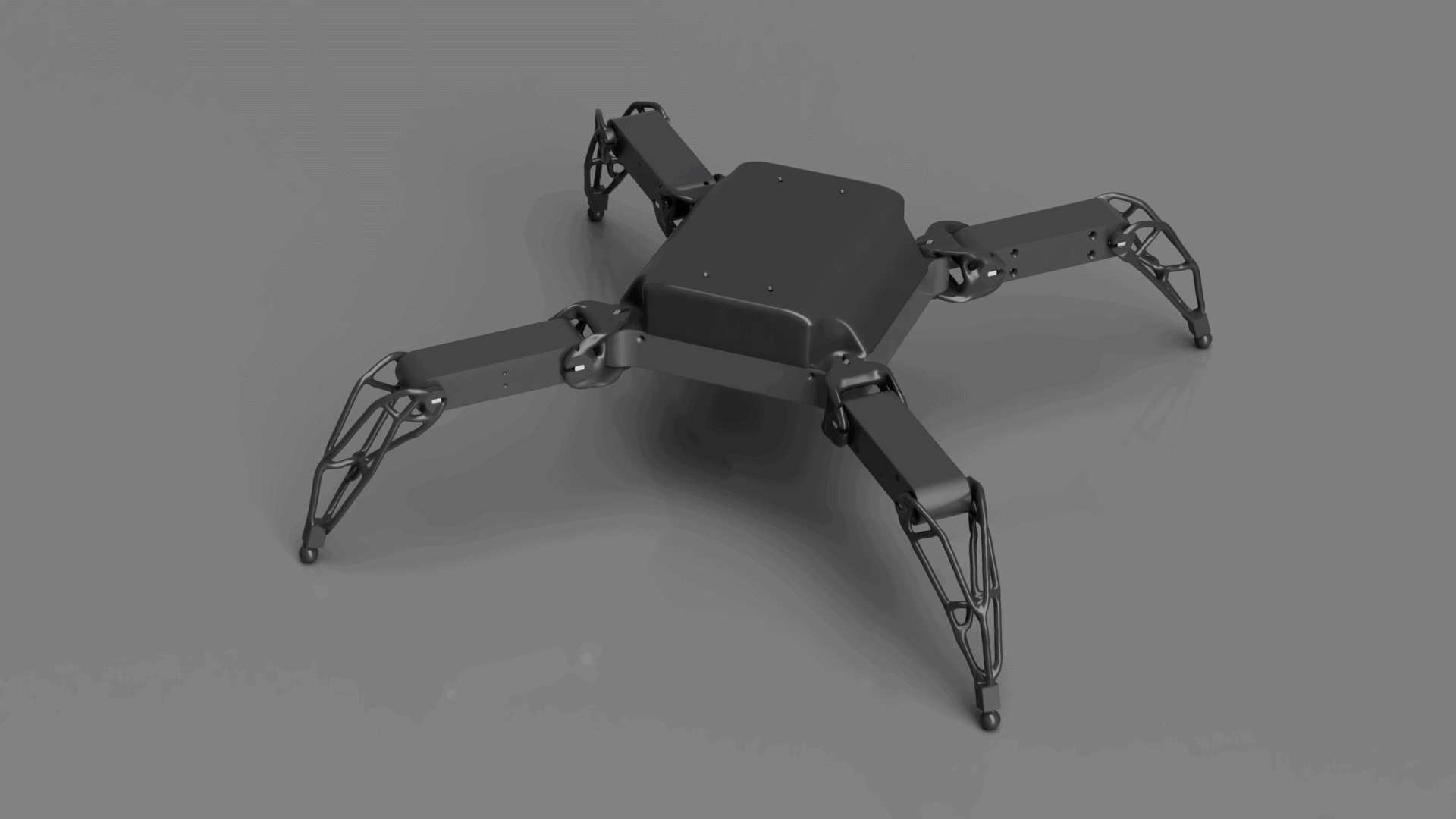
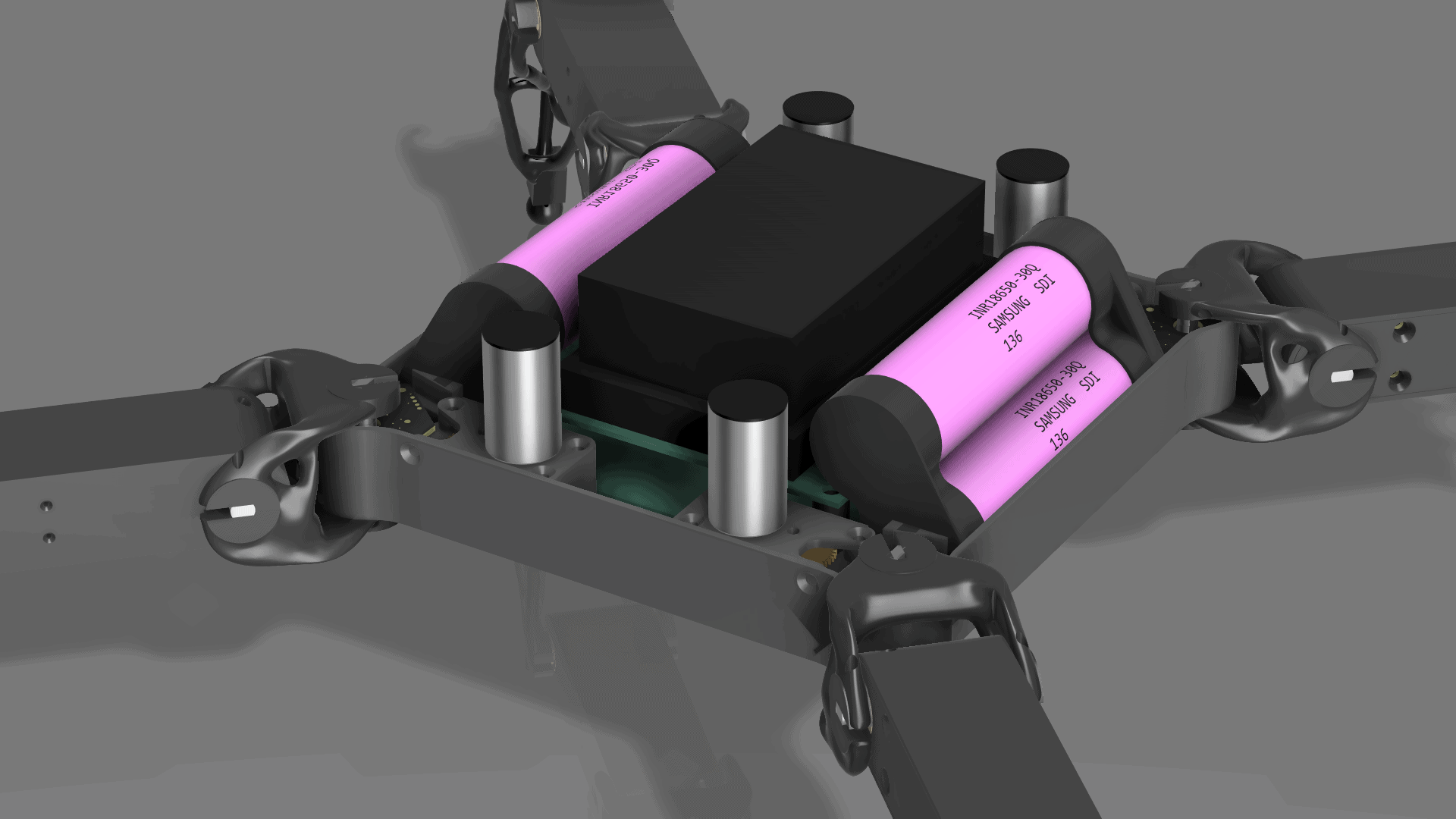
 And the project stalled at:
And the project stalled at:
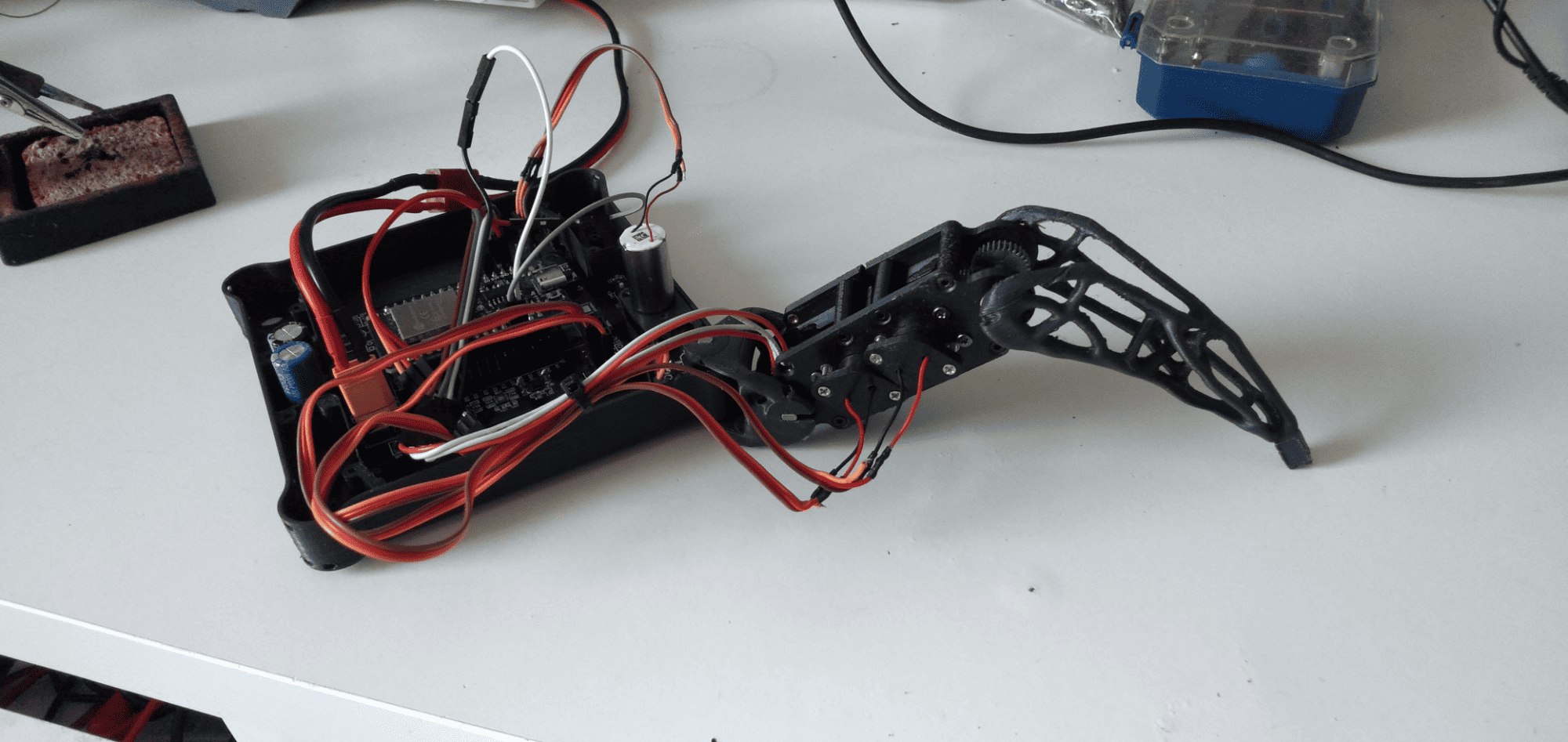 The hardware is working. It’s missing the code (or more specifically, the DC driver library). So to conclude; here’s the very very basic and first and whatnot roadmap of the project:
The hardware is working. It’s missing the code (or more specifically, the DC driver library). So to conclude; here’s the very very basic and first and whatnot roadmap of the project:
- make the prototype leg work
- copy the prototype leg 3 times
- assemble them into one 4 legged platform
- make first tests with sensors (incl. strain gauges), inverse kinematics, walking concepts
- and then think of what’s next.
The project may continue in the state it is right now (so the robot being small, and using DC motors) or I can switch to BLDC motors and a bigger size. Or both, just creating two similar robots.
This little blog is going to summarize the progress at least one time every quarter (during school times) and monthly (when I have lots of free time). The twitter (@leoneq112) is going to be used for frequent, little updates.
The project is going to be documented in Polish too, but on this forum. (or here when someone tells me how to make i18n work)
For now bye bye !!